|
Main /
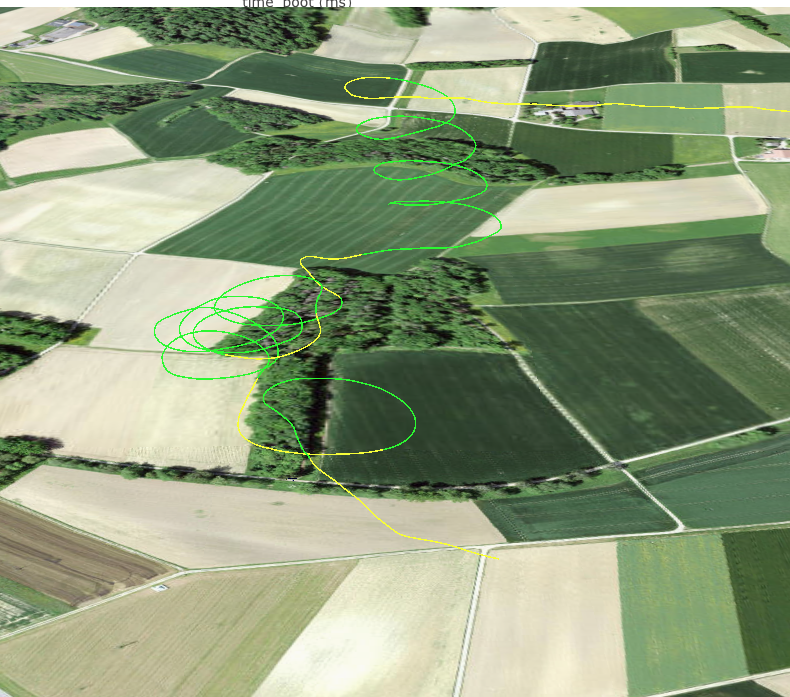
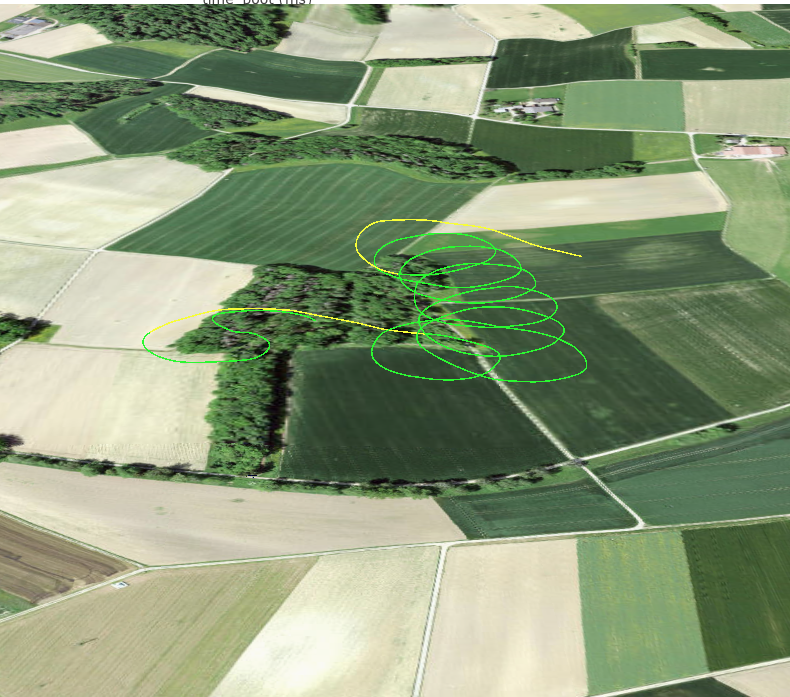
Autonomous SoaringJuly 10, 2023, at 07:37 am (0 comments)  Image 1: Flight path from an automous flight For a good year I have been working in my spare time on a RC glider that can fly autonomously. This week I was finally able to carry out the final test flight. The result impressed me. The picture above shows the flight path of the model during the flight, which lasted about 45 minutes. The small dots on the red line mark one second each, so that one can distinguish between slowly flown and quickly flown sections. In addition to a conventional remote control, the model is equipped with a Pix32v5 flight computer running ArduPilot. During the test flight, the model should fly a simplified 8-figure 6 times after the automatic take-off and then land automatically. After the 1st climb to an altitude of 100m, the model should take thermals and circle in them until an altitude of 200m has been reached or there is no measurable upwind any more. The result can be seen in the picture above.  Image 2: Flight altitude profile The altitude profile shows three areas with significant thermals. The exit from circling in the upwind occurred in area 1 and in area 3 after reaching the preset maximum altitude of 200m and in area 2 after no more climb was measured. After the first area, the airspeed was temporarily increased so that the altitude could be reduced.
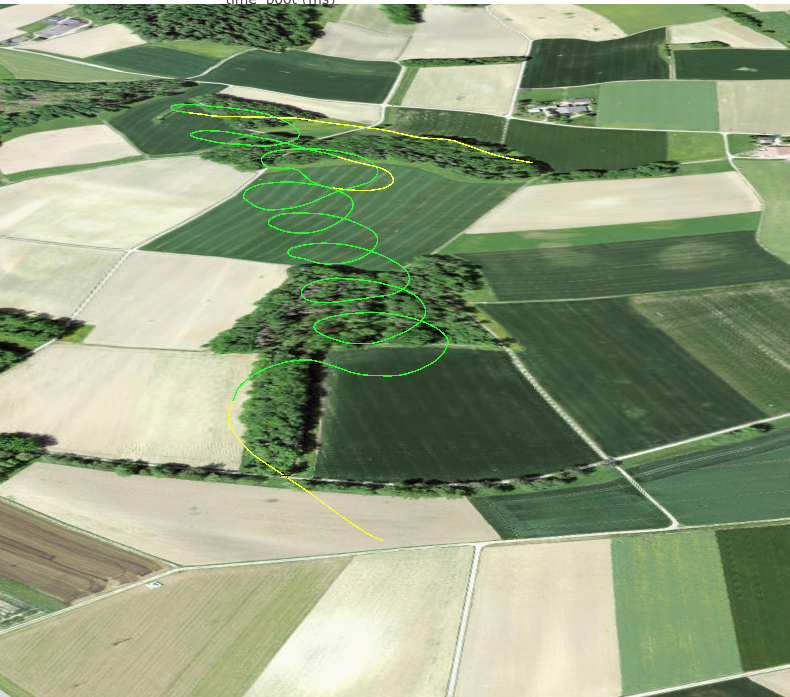
Image 3: Circling upwind After the climb to an altitude of 100m, the engine was only needed twice for 12 seconds each, as the specified minimum altitude of 50m was undershot. The configuration of the Soaring module of ArduPilot requires measuring the flight performance (polar). I did this on a few evenings without any thermals. To do this, I switched on "Soaring" and let the model fly a course at different speeds. In the process, the model climbs to 100m with the motor and then descends to 50m in gliding flight. Then this process is repeated. From the average speed during the glide and its duration, one then obtains the desired values. With the help of Spreadsheat shared by Samuel Tabor you can then calculate the required parameters. 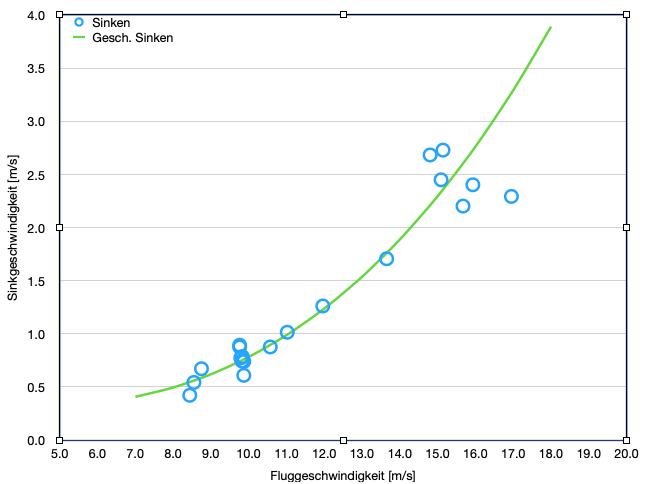 Figure 4: Measured flight polar When assessing the flight performance, however, one must take into account that at least one right-angle change of direction took place for each of these readings, as I have to fly strictly VLOS.  Image 5: The glider after landing The technical data of the model:
Implemented features:
The model is indistinguishable from a classic RC model - all antennas and instruments are neatly installed in the fuselage. Only the Pitot tube in the left wing is visible from the outside. The model can be flown conventionally as well as with stabilisation (Fly By Wire) or with autopilot. However, it takes some time and patience to configure the flight computer to the point where it can reliably fly an aircraft. And until that time, one must expect critical flight conditions at any time. |